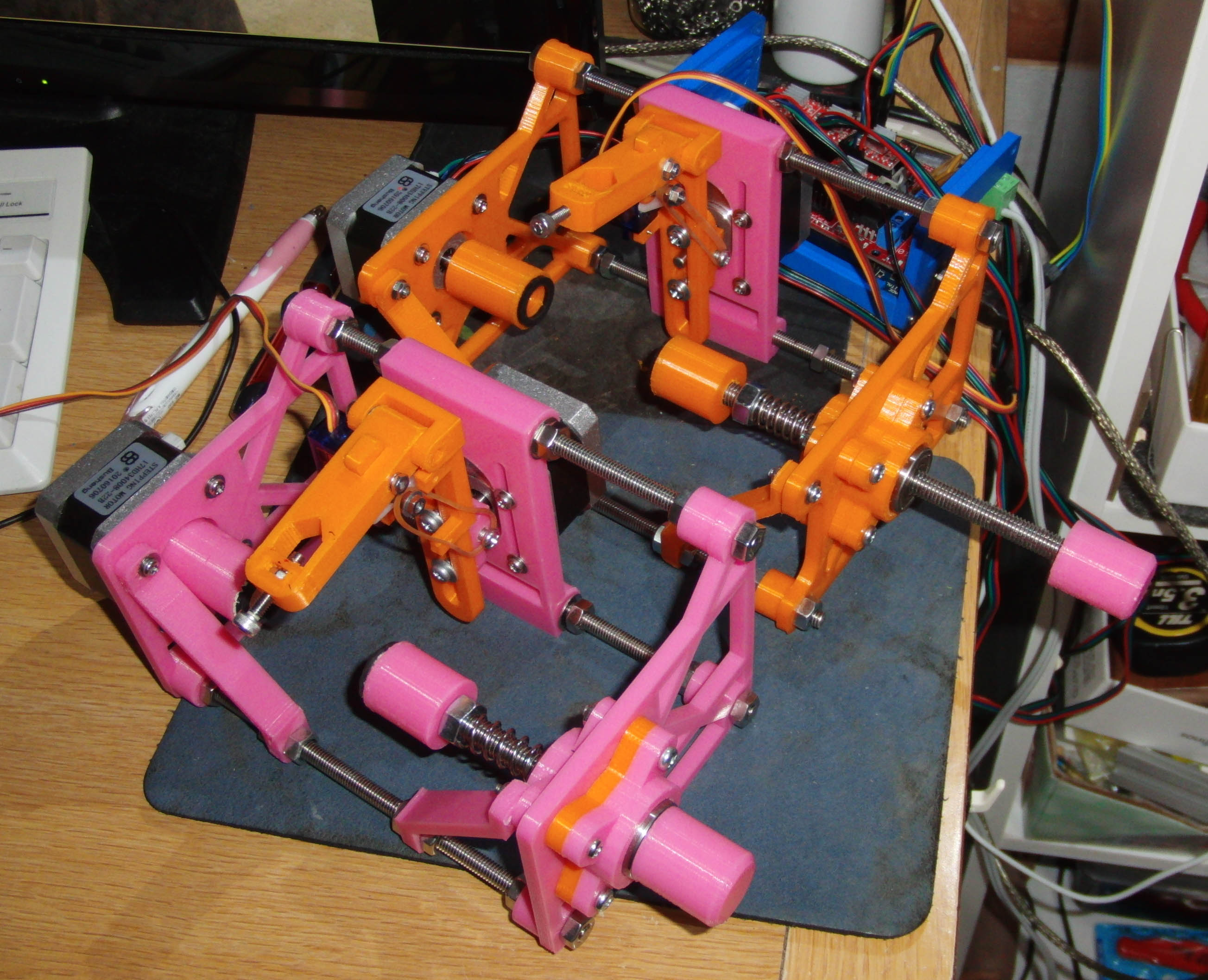
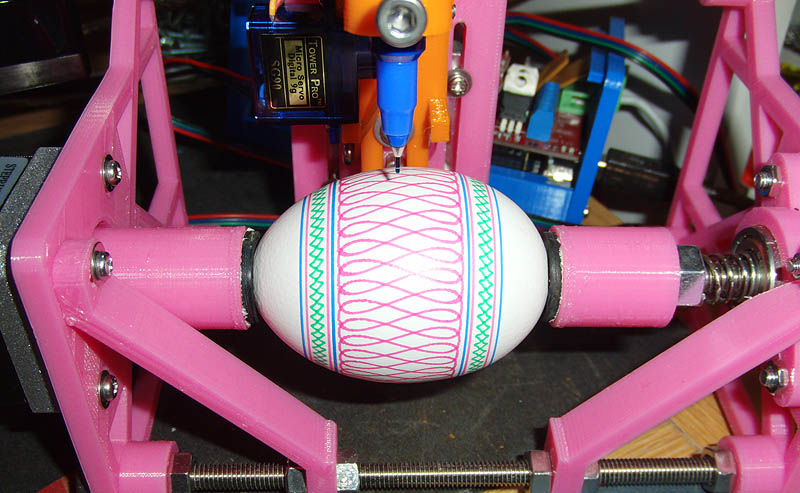
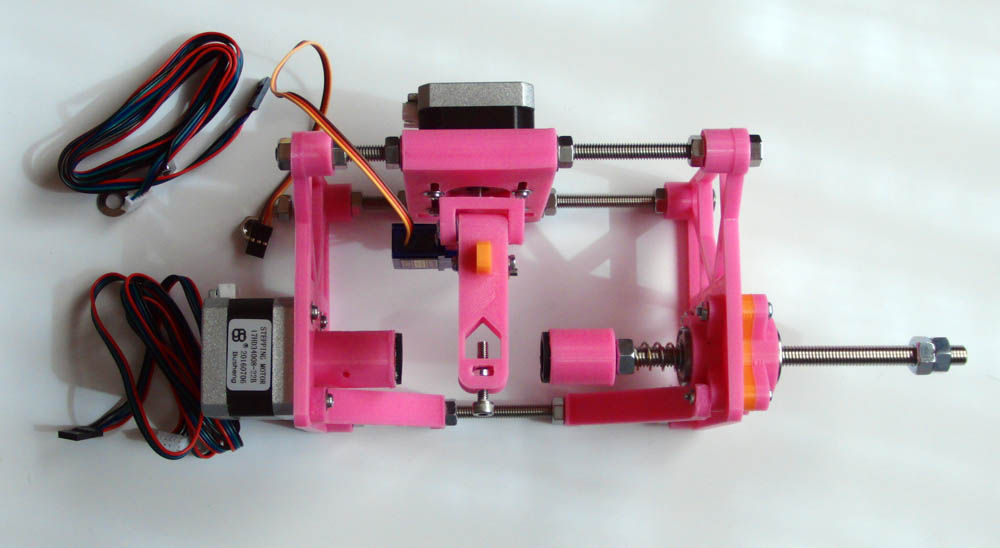
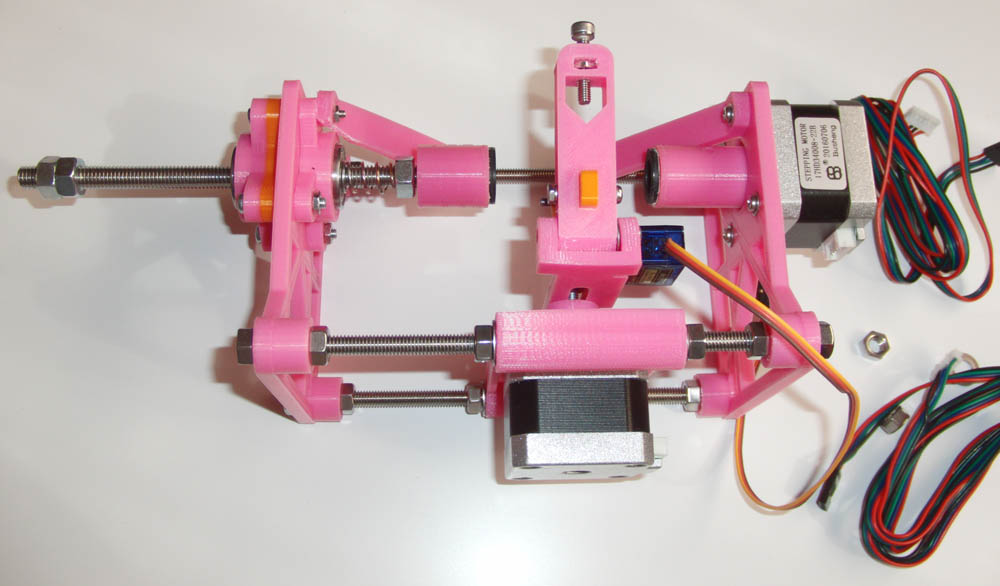
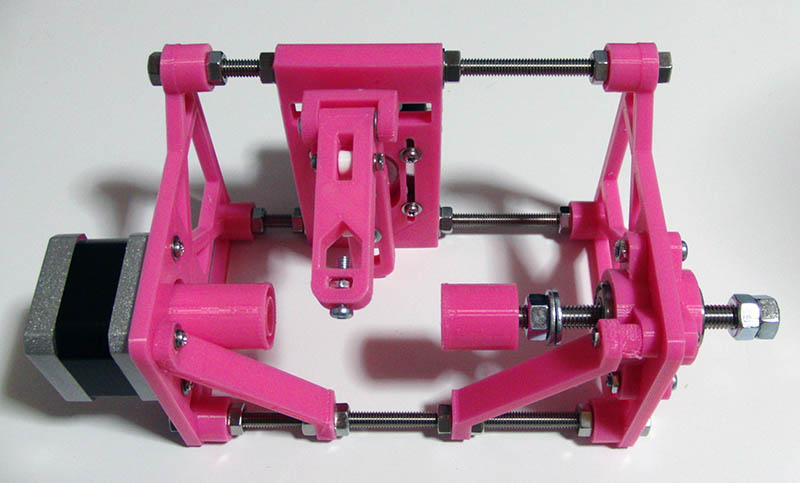
چ،‰ٌگ»چى‚µ‚½پuEggbotپv‚ج–{‘جƒtƒŒپ[ƒ€
پiServo‚âپAƒlƒW—قپAٹî”آ‚ب‚ا‚ًڈœ‚پj
ƒ\پ[ƒX‚ً•دچX‚·‚éژ–‚ة‚و‚ء‚ؤپuServoپv‚ًچ¶‰E‚ا‚؟‚ç‚ة‚àژو‚è•t‚¯‚ç‚ê‚é‚و‚¤‚ة•دچXپB
پuServoپv‚ًژو‚è•t‚¯‚ب‚¢•ذ‘¤‚ة‚حپA‚»‚جƒlƒWŒٹ‚ةپuƒyƒ“ƒAپ[ƒ€پv‚ئ’ش‚éپA
ژم‚¢پuˆّ‚ء’£‚èƒoƒlپv‚ًژو‚è•t‚¯‚éپB
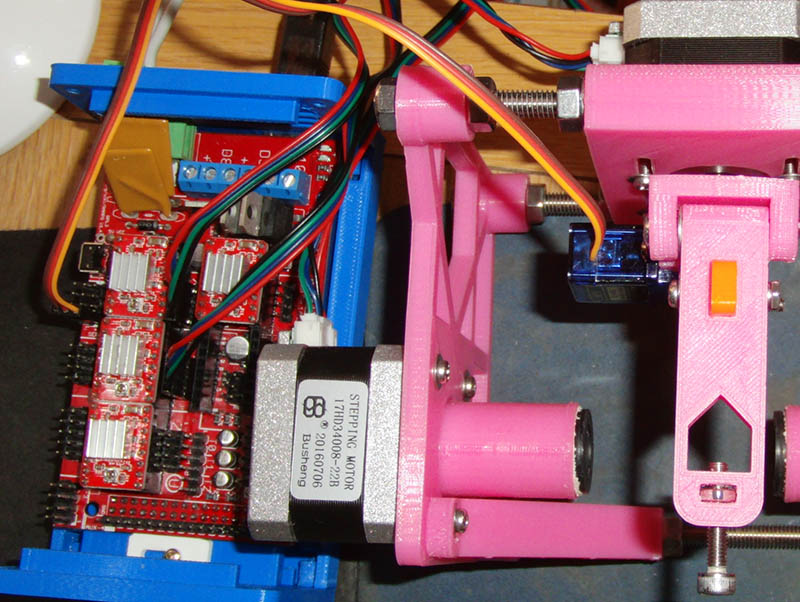
پi”–‚¢ٹk‚جƒ^ƒ}ƒS‚ة0.1ƒ~ƒٹ‚ب‚ا‚جچׂ¢ƒyƒ“‚إ•`‰و‚µ‚½چغپAƒyƒ“گو‚ھٹk‚ةگعگG‚µ‚½ڈuٹشپAٹk‚ةŒٹ‚ًٹJ‚¯‚ؤ‚µ‚ـ‚¤ژ–‚ھ‚ ‚ء‚½پB
Œ»چف‚حƒoƒl‚ج‘م‚ي‚è‚ةپAژم‚¢—ح‚إپAگL‚ر‚ج—ا‚¢—ضƒSƒ€‚ً—ک—p‚µ‚ؤ‚¢‚éپBپj
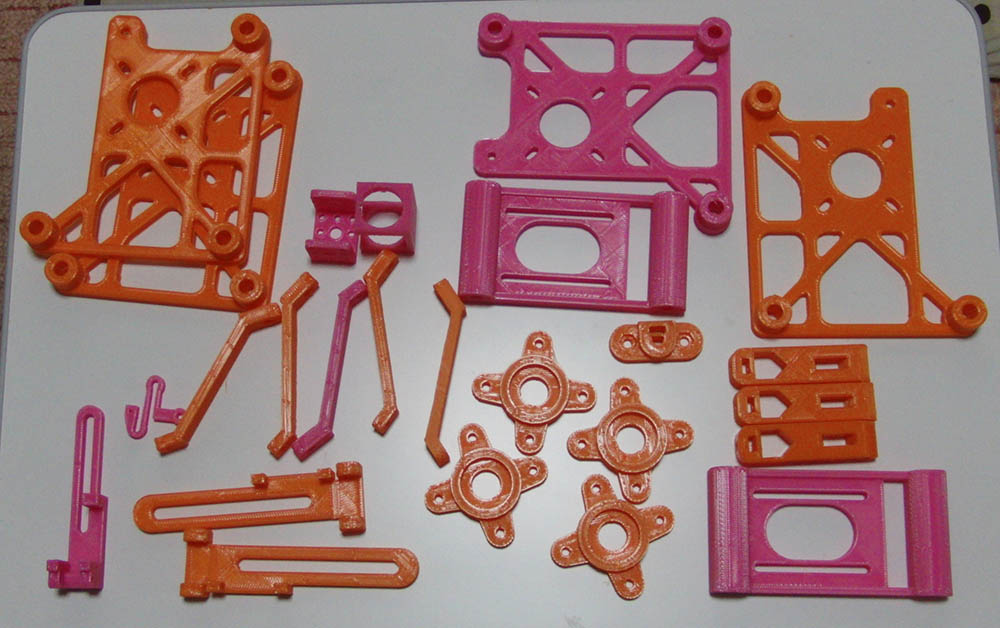
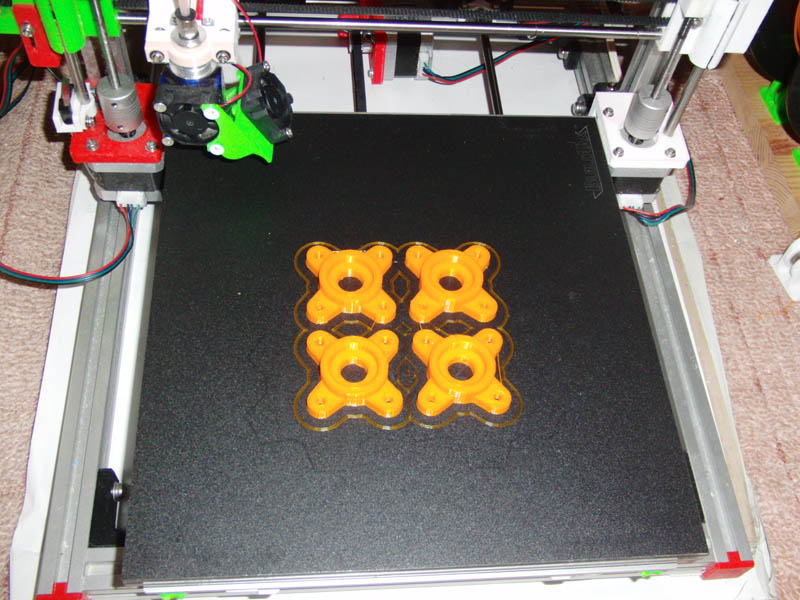
گ»چى‚·‚éچغ‚حپA3Dƒvƒٹƒ“ƒ^پ[‚إˆَچü‚إ‚«‚é‚و‚¤‚ةٹeƒpپ[ƒc‚ًپustlپvŒ`ژ®‚إƒGƒNƒXƒ|پ[ƒg‚·‚é•K—v‚ھ‚ ‚éپB
ƒtƒŒپ[ƒ€–{‘ج‚ًچ‡”آ‚إچى‚éڈêچ‡پAژو‚è•t‚¯ˆت’u‚جگc‚ًگ³ٹm‚ةچ‡‚ي‚·•K—v‚ھ‚ ‚é‚ھپA‚»‚ê‚ظ‚ا“‚¢‰ءچH•”•ھ‚ح–³‚¢پB
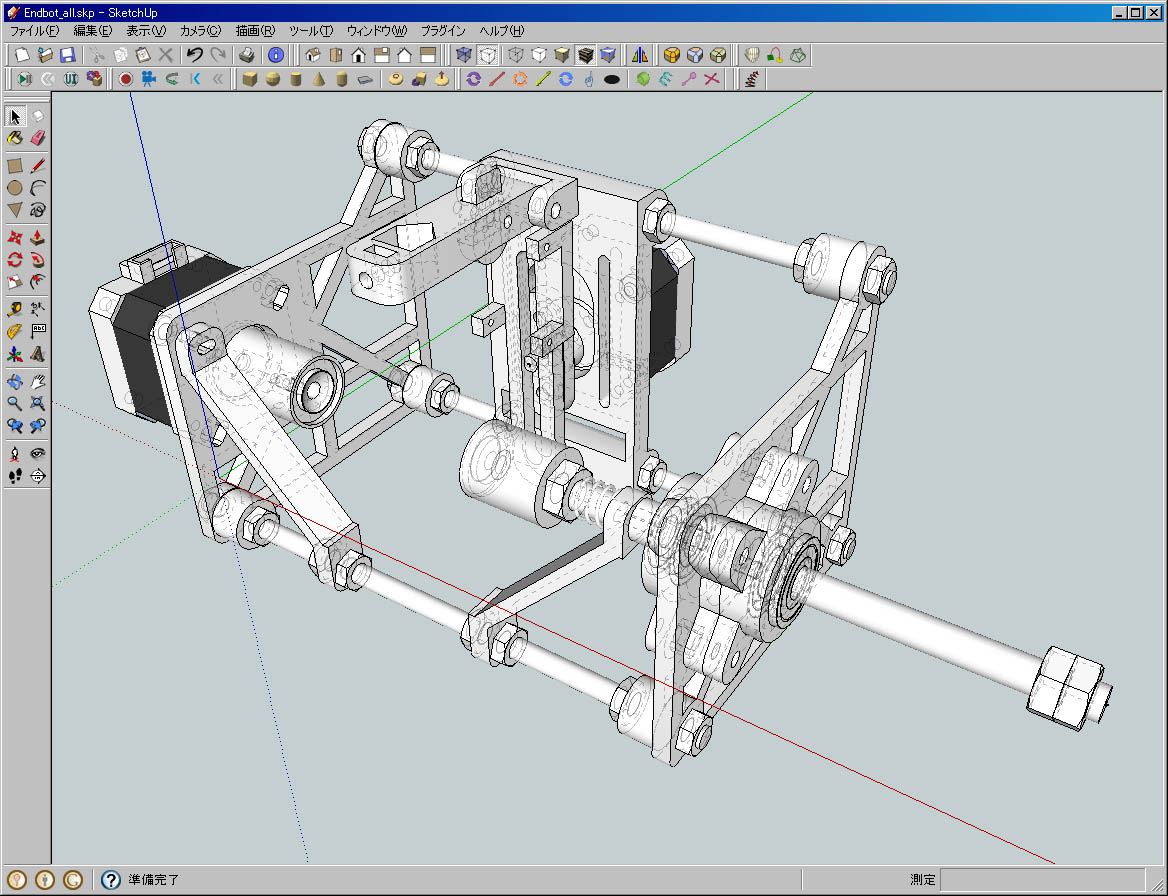
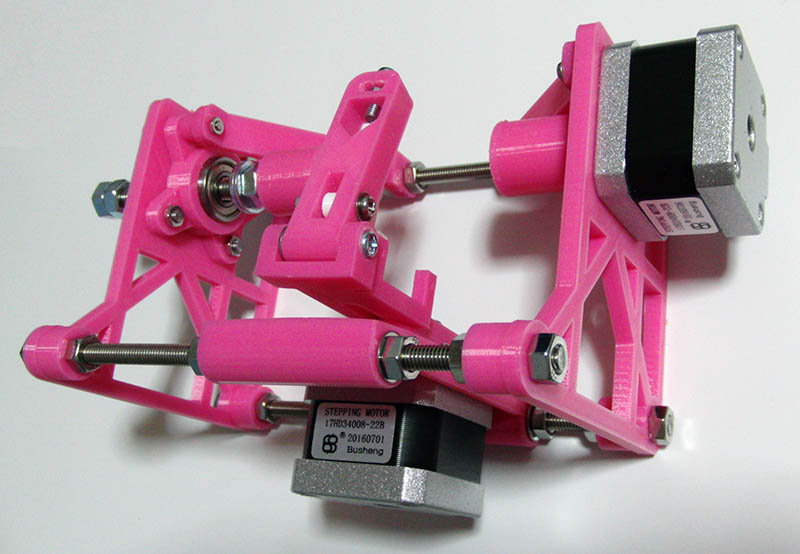
چ،‰ٌ‚حپAƒyƒ“ƒAپ[ƒ€‚جڈ¸چ~‚ةٹù’è‚جƒoƒlپiƒtƒBƒ‰ƒپƒ“ƒg‚ًSژڑŒ`‚ةƒvƒٹƒ“ƒg‚µ‚½‚à‚جپj‚ً—ک—p‚¹‚¸پAپuServoپv‚ة•‰’S‚ھ‚©‚©‚ç‚ب‚¢‚و‚¤پAژ‚؟ڈم‚°‚邾‚¯‚جچ\‘¢‚ة•دچX‚µ‚ؤ‚ ‚èپA‚»‚ج‚½‚كServo‚جژو‚è•t‚¯‚ھڈم‰؛‹t‚ة‚ب‚éپB
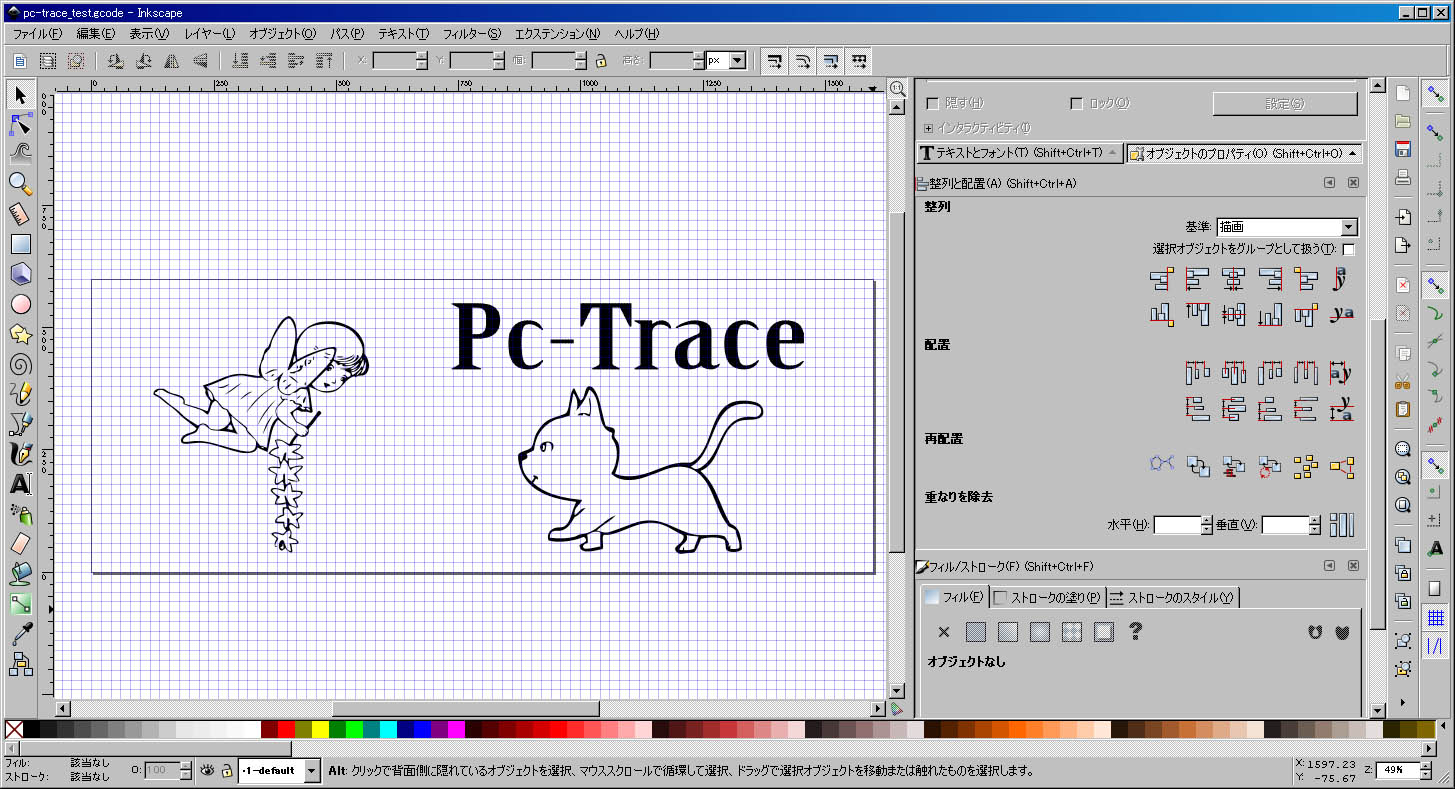
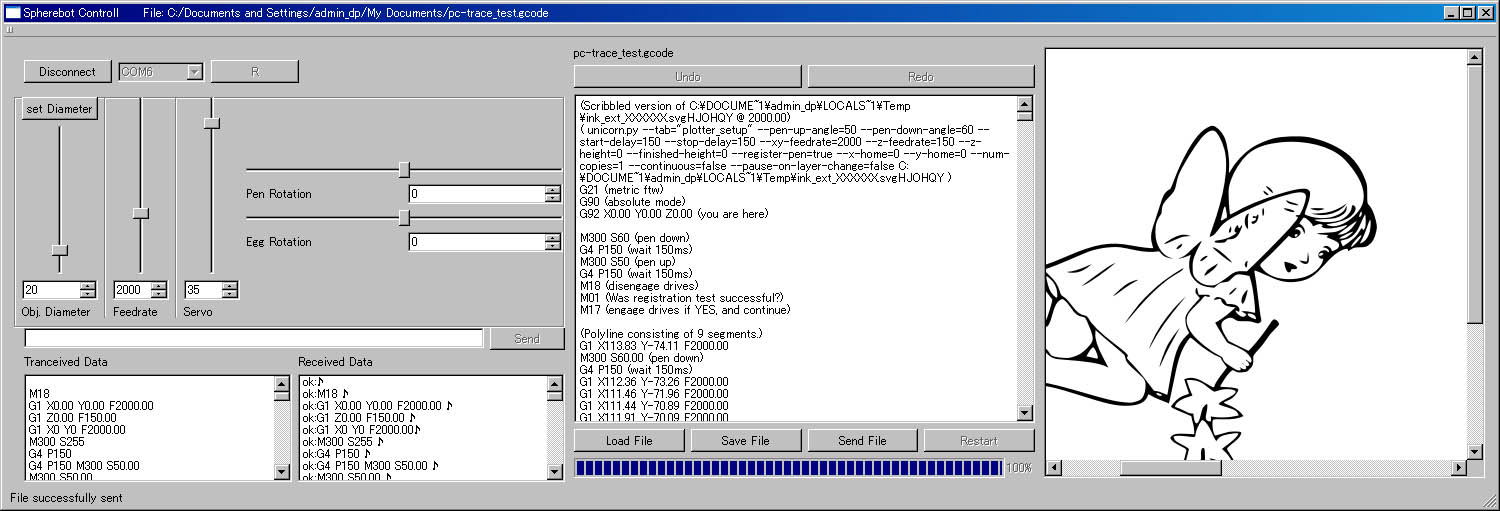
گ»چى‚µ‚½ƒnپ[ƒh‚جٹآ‹«‚ةچ‡‚ي‚¹‚ؤپAپuInkscapeپv‚جپucontext.pyپv‚ًˆب‰؛‚ج‚و‚¤‚ةڈ‘‚«ٹ·‚¦‚ؤ—ک—p‚µ‚½‚ھپA‚ ‚‚ـ‚إŒآگl‚جٹآ‹«‚ةچ‡‚ي‚¹‚ؤ•دچX‚µ‚½‚à‚ج‚ب‚ج‚إپA‹K’è‚جƒ\پ[ƒX‚ً‚»‚ج‚ـ‚ـ—ک—p‚·‚éژ–‚ھ–]‚ـ‚µ‚¢پB
پiپ¦ƒyƒ“Œًٹ·ژ‚ةƒAپ[ƒ€‚ھ“®‚©‚ب‚¢‚و‚¤پAڈي‚ةگ§“®‚جŒّ‚¢‚½ڈَ‘ش‚إ’âژ~‚·‚éپBپj
“Y•t‚µ‚½ƒ\پ[ƒX‚جƒ‹پ[ƒgپiXP‚جڈêچ‡پj
C:\Program Files\Inkscape\share\extensions\unicorn
–Y‚ê‚ھ‚؟‚ب‚ج‚ھپAƒ\پ[ƒXڈ‘‚«ٹ·‚¦Œم‚ةپA‘O‚ةƒRƒ“ƒpƒCƒ‹‚³‚ê‚ؤ‚¢‚½“¯–¼‚جپupycپvƒtƒ@ƒCƒ‹‚ًچيڈœ‚µ‚ؤپuInkscapeپv‚ًچؤ‹N“®‚µ‚ب‚¯‚ê‚خچXگV‚µ‚½ƒ\پ[ƒX‚ج“à—e‚ھ”½‰f‚³‚ê‚ب‚¢ژ–پB
ڈ‘‚«ٹ·‚¦‚½ƒ\پ[ƒXپipyپj‚جƒRƒ“ƒpƒCƒ‹پEƒtƒ@ƒCƒ‹پipycپj‚حپA‹N“®ژ‚ة‘¶چف‚µ‚ب‚¯‚ê‚خژ©“®‚إگ¶گ¬‚³‚ê‚éپB
پucontext.pyپv
----------------------------------------------------------------from math import *
import sys
class GCodeContext:
def __init__(self, xy_feedrate, z_feedrate, start_delay, stop_delay, pen_up_angle, pen_down_angle, z_height, finished_height, x_home, y_home, register_pen, num_pages, continuous, file):
self.xy_feedrate = xy_feedrate
self.z_feedrate = z_feedrate
self.start_delay = start_delay
self.stop_delay = stop_delay
self.pen_up_angle = pen_up_angle
self.pen_down_angle = pen_down_angle
self.z_height = z_height
self.finished_height = finished_height
self.x_home = x_home
self.y_home = y_home
self.register_pen = register_pen
self.num_pages = num_pages
self.continuous = continuous
self.file = file
self.drawing = False
self.last = None
self.preamble = [
"(Scribbled version of %s @ %.2f)" % (self.file, self.xy_feedrate),
"( %s )" % " ".join(sys.argv),
"G21 (metric ftw)",
"G90 (absolute mode)",
"G92 X%.2f Y%.2f Z%.2f (you are here)" % (self.x_home, self.y_home, self.z_height),
""
]
self.postscript = [
"",
"(end of print job)",
"M300 S%0.2F (pen up)" % self.pen_up_angle,
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
"M300 S255 (turn off servo)",
"G1 X0 Y0 F%0.2F" % self.xy_feedrate,
"G1 Z%0.2F F%0.2F (go up to finished level)" % (self.finished_height, self.z_feedrate),
"G1 X%0.2F Y%0.2F F%0.2F (go home)" % (self.x_home, self.y_home, self.xy_feedrate),
"M300 S%0.2F (pen up)" % self.pen_up_angle,
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
" (M18 drives off)",
]
self.registration = [
"M300 S%d (pen down)" % (self.pen_down_angle),
"G4 P%d (wait %dms)" % (self.start_delay, self.start_delay),
"M300 S%d (pen up)" % (self.pen_up_angle),
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
"M18 (disengage drives)",
"M01 (Was registration test successful?)",
"M17 (engage drives if YES, and continue)",
""
]
self.sheet_header = [
"(start of sheet header)",
"G92 X%.2f Y%.2f Z%.2f (you are here)" % (self.x_home, self.y_home, self.z_height),
]
if self.register_pen == 'true':
self.sheet_header.extend(self.registration)
self.sheet_header.append("(end of sheet header)")
self.sheet_footer = [
"(Start of sheet footer.)",
"M300 S%d (pen up)" % (self.pen_up_angle),
"G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay),
"G91 (relative mode)",
"G0 Z15 F%0.2f" % (self.z_feedrate),
"G90 (absolute mode)",
"G0 X%0.2f Y%0.2f F%0.2f" % (self.x_home, self.y_home, self.xy_feedrate),
"M01 (Have you retrieved the print?)",
"(machine halts until 'okay')",
"G4 P%d (wait %dms)" % (self.start_delay, self.start_delay),
"G91 (relative mode)",
"G0 Z-15 F%0.2f (return to start position of current sheet)" % (self.z_feedrate),
"G0 Z-0.01 F%0.2f (move down one sheet)" % (self.z_feedrate),
"G90 (absolute mode)",
"M18 (disengage drives)",
"(End of sheet footer)",
]
self.loop_forever = [ "M30 (Plot again?)" ]
self.codes = []
def generate(self):
if self.continuous == 'true':
self.num_pages = 1
codesets = [self.preamble]
if (self.continuous == 'true' or self.num_pages > 1):
codesets.append(self.sheet_header)
elif self.register_pen == 'true':
codesets.append(self.registration)
codesets.append(self.codes)
if (self.continuous == 'true' or self.num_pages > 1):
codesets.append(self.sheet_footer)
if self.continuous == 'true':
codesets.append(self.loop_forever)
for codeset in codesets:
for line in codeset:
print line
else:
for p in range(0,self.num_pages):
for codeset in codesets:
for line in codeset:
print line
for line in self.postscript:
print line
def start(self):
self.codes.append("M300 S%0.2F (pen down)" % self.pen_down_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.start_delay, self.start_delay))
self.drawing = True
def stop(self):
self.codes.append("M300 S%0.2F (pen up)" % self.pen_up_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay))
self.drawing = False
def go_to_point(self, x, y, stop=False):
if self.last == (x,y):
return
if stop:
return
else:
if self.drawing:
self.codes.append("M300 S%0.2F (pen up)" % self.pen_up_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.stop_delay, self.stop_delay))
self.drawing = False
self.codes.append("G1 X%.2f Y%.2f F%.2f" % (x,y, self.xy_feedrate))
self.last = (x,y)
def draw_to_point(self, x, y, stop=False):
if self.last == (x,y):
return
if stop:
return
else:
if self.drawing == False:
self.codes.append("M300 S%0.2F (pen down)" % self.pen_up_angle)
self.codes.append("G4 P%d (wait %dms)" % (self.start_delay, self.start_delay))
self.drawing = True
self.codes.append("G1 X%0.2f Y%0.2f F%0.2f" % (x,y, self.xy_feedrate))
self.last = (x,y)

“Y•tƒtƒ@ƒCƒ‹